|
北大谢广明课题组在多智能体领域取得新进展 2014-05-07 11:08:26 来源: 南方网 暂无网友评论
浏览字号: | | 通过Email推荐给好友:
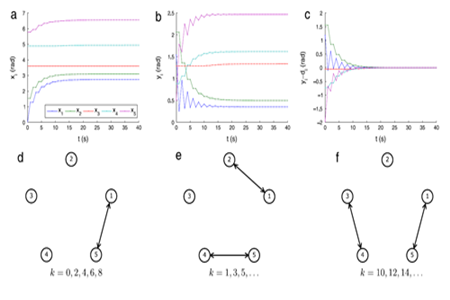
近期,工学院谢广明课题组在多智能体系统的编队控制研究中取得了一系列研究进展,相关论文发表于控制科学的国际顶级期刊 IEEE Transactions on Automatic Control和 Automatica。 多智能体系统涉及控制、数学、生物、物理、计算机、机器人、通讯和人工智能等学科,是近年来多学科前沿交叉领域的重要研究方向之一,受到国内外学者的广泛关注。 谢广明教授的团队是国内较早展开多智能体系统相关研究的人员,强调以多机器人协作控制为应用背景,在若干方向取得了创新性结果。在以往研究的研究基础上,谢广明团队进一步研究了多智能体系统的编队控制问题,特别针对环形编队问题,取得了系统深入的成果。 谢广明及合作者首先针对一阶动态描述个体的系统,提出了一种分布式控制协议来实现任意环形编队,严格证明了控制协议的收敛性。从理论上严格证明所提出的控制协议具有一个重要特性——保持在形成期望环形编队的过程中,个体之间不会发生碰撞。作者进一步研究了基于采样数据的控制协议和能够保证在给定的任意有限时间内形成期望环形编队的有限时间控制协议。此外,将有关结果推广到二阶系统上。该成果发表于IEEE Transactions on Automatic and Control(C. Wang, G. Xie, M. Cao, Forming circle formations of anonymous mobile agents with order preservation, IEEE Transactions on Automatic Control, 58(12), 3248–3254, 2013)。 考虑到一些机器人在运动时无法倒退的特性,谢广明及其合作者研究了具有单向运动限制的多智能体系统的环形编队问题,提出了一种基于采样控制的分布式控制协议,严格证明了控制协议的收敛性以及整个过程中个体之间不会碰撞。值得注意的是,此类系统属于受限类动力学系统,基于传统的李雅普诺夫稳定性的方法已经无法处理。为此,作者通过大量仿真获得对系统全面完整的观察,深入分析了问题的具体特性,发现了系统运行过程中始终会出现静止不动个体的现象并给出严格证明,基于这个特性最终给出了协议收敛性的严格完整证明。该成果以长文 (Regular Paper) 的形式发表于Automatica(C. Wang, G. Xie, M. Cao, Controlling anonymous mobile agents with unidirectional locomotion to form formations on a circle, Automatica, 50(4), 1100–1108, 2014)。 两篇论文的通讯作者为谢广明教授,第一作者为谢广明课题组的博士王晨。该研究得到了国家自然科学基金等项目的资助。本项目的合作者包括荷兰格罗宁根大学的Ming Cao教授,双方保持了密切的合作关系。
(来源:北大新闻网)(编辑邹长森) 作者: |


 香格里拉古城火灾原因
香格里拉古城火灾原因 中国忽然对美态度大转
中国忽然对美态度大转 我的世界作品展示 天
我的世界作品展示 天 郑国光要求做好青奥会
郑国光要求做好青奥会 秦岭与黄河对话倒计时
秦岭与黄河对话倒计时 郑州环保局开门纳谏
郑州环保局开门纳谏